 Adanada Robotik Kodlama Eğitimi Veren YerlerGeleceğin mühendislerini yetiştiriyoruz. Adana robotik kodlama atölyesi olarak bu eğitimlerde katılımcıların Robotik dünyası ile tanışmalarını, her yaş grubuna uygun...DEVAMI
Adanada Robotik Kodlama Eğitimi Veren YerlerGeleceğin mühendislerini yetiştiriyoruz. Adana robotik kodlama atölyesi olarak bu eğitimlerde katılımcıların Robotik dünyası ile tanışmalarını, her yaş grubuna uygun...DEVAMIGoogle AIY Robot arkadaşı
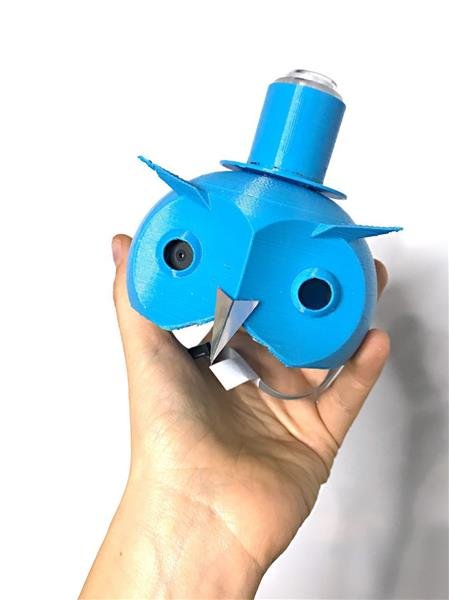
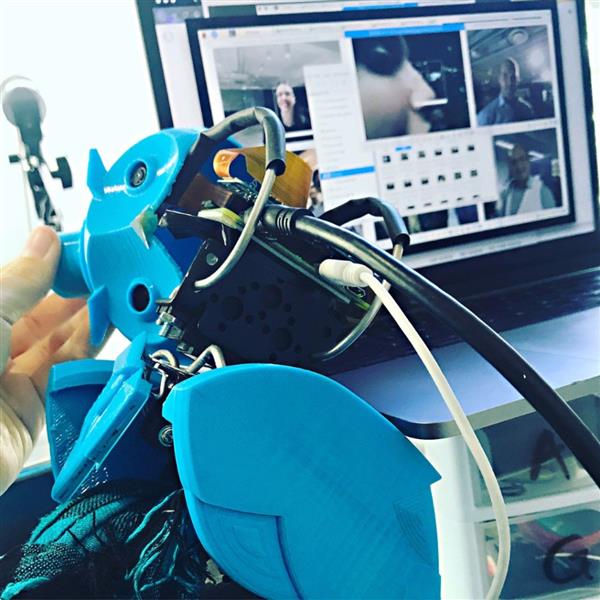
Tanıdık Archer'larla tanış! Omzuma oturan ve etrafımdaki insanların duygularını algılayan robotik bir baykuş. Ardından renkli ışıklar ve küçük bip sesleri ile geri bildirim veriyor. Motorları kontrol eden bir Arduino ile pan / tilt servo gimbal sayesinde de hareket edebilir ve etrafına bakabilir.
BEYİN
Yapının ilk kısmı Google AIY Vision kitini bir araya getiriyor. Bu “DIY AI” tanıtım kiti Archimedes'ın beyin ve duyusal sistemini oluşturuyor: “kaput” eklentili bir Raspberry Pi Zero W, kamera, piezo hoparlör ve çok renkli ışıklandırma düğmesi. Katlanmış karton muhafazanın montajı gerçekten eğlenceli.
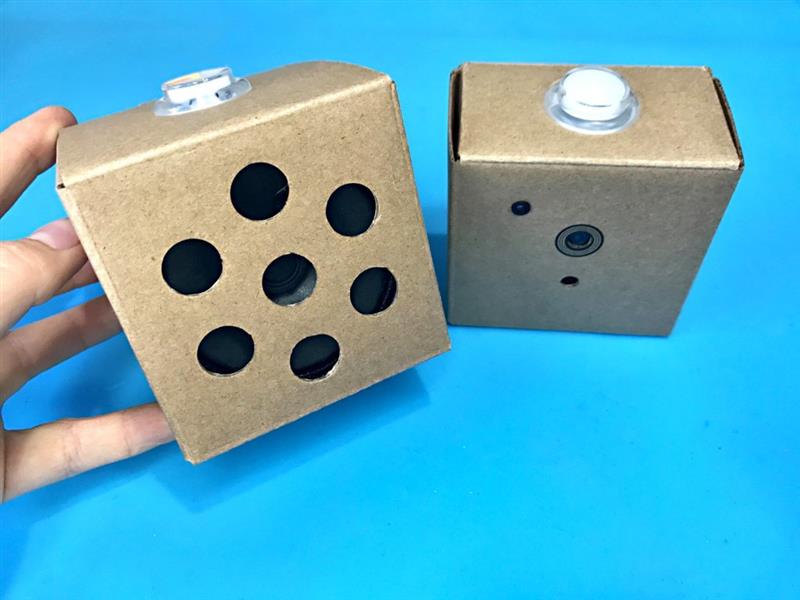
Kitin bir araya getirilmesi için Google’ın resmi talimatlarını takip edin ve çalışıp çalışmadığından emin olmak için kurulumu test edin. Varsayılan Joy Detector demosunu herhangi bir ek kodlama yapmadan çalıştırabilmelisiniz, ancak isterseniz, Python'da yazabilirsiniz. Joy Detector, bir kişinin gülümsediğini (düğme sarıya döner) veya çatık olup olmadığını (düğme maviye döner) algılamak için makine öğrenimini kullanır. Gerçekten büyük ifadeler için, sesli uyarı da duyulur. Fotoğraf makinesi birden fazla yüzü görürse, sevinç puanlarını artırır.
İPUCU: Pi ve kaputu mekanik stresten korumak için plastik dayanakları taktığınızdan emin olun. Kiti daha sonra ayırdığımda benimki kırıldı, bu yüzden fazladan beklemeler alın.
VÜCUT HAREKETLERİ
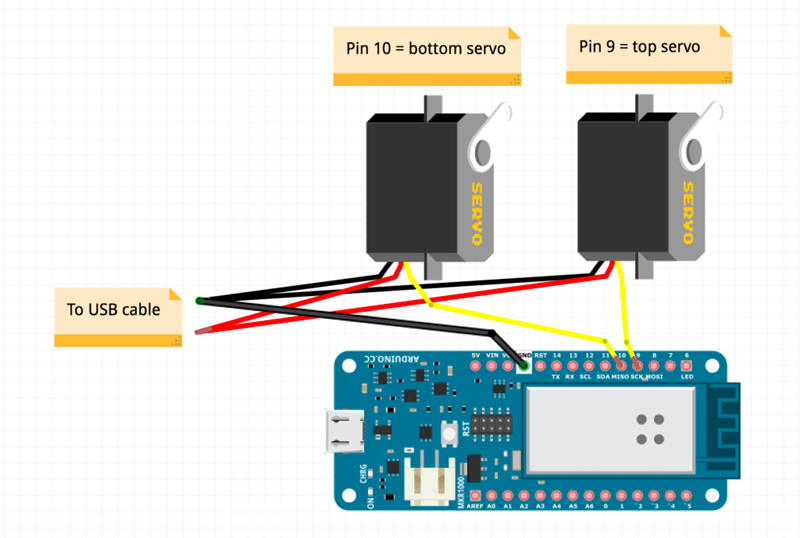
İki servo motor Arşimetlerin vücudunu yukarı ve aşağı yatırmasını ve başını yana çevirmesini sağlar. HackerBoxes'ın “Vision Quest” kitinden bir pan / tilt mekanizmasıyla başladım ancak pan / tilt gimbal kurulumunu kullanabilirsiniz; Eğer zaten etrafta bir çift servo varsa, Thingiverse'de 3D baskılı parçalar var. “Eğim” parçasının altta ve “pan” üstte olduğundan emin olun; çünkü baykuşlar genellikle bacaklarının üzerinde dönmezler. Servolarınızda hızlı bir kalibrasyon yapın ve toleranslarını kontrol edin. Her iki yöne gidebilecekleri en uzak şey nedir? (Eğer uğultuluğa ya da vızıltmaya başlarlarsa, çok uzağa itilirler.) Arduino taslağını düzenlemek için düzenleyin; Kodu indirebilirsin. Şu anda Arduino sadece servoları rastgele hareket ettiriyor, böylece Archimedes yüzler için etrafa bakabiliyor. Ancak, farklı davranışlar için kodu değiştirebilir veya daha da iyisi Raspberry Pi'nin nasıl yapılacağını anlayabilirsiniz! Metal dişliler ile servoları tavsiye ederim; Biraz ağırlar, ancak böyle bir robotu kontrol etmeyi kesinlikle başarabilirler. Metal montajlar yerine 3D baskılı montajlar kullanıyorsanız, plastik dişli servolardan kurtulabilirsiniz. Ayrıca, tüm robot biraz daha hafif olurdu, bu da hoş olabilirdi. İki servo Arduino'ya bağlandı.
Birlikte her şeyi lehimlemek için zaman ayırın ve her şey işe yaradığında, bağlantıları yalıtmak ve stabilize etmek için sıcak tutkalla kaplayabilirsiniz.
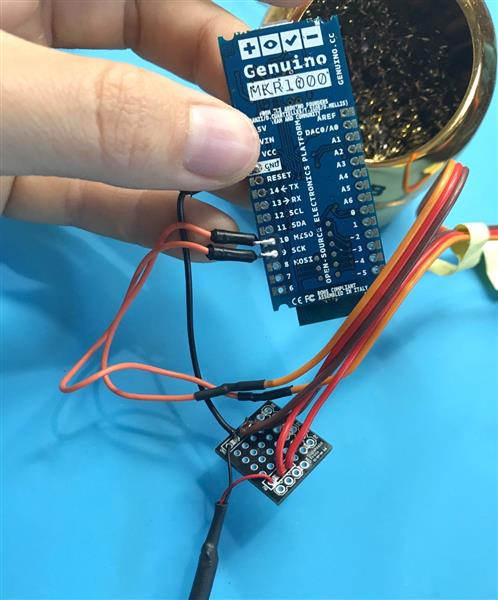
Hiçbir şeyin kısa olamayacağından emin olmak için, dallanma bağlantılarını yapmak için başka bir projeden küçük bir protokol kullandı.
3D BASKI
Arşimet'in 3D baskılı gövde parçalarını tasarlamak için tarayıcı tabanlı CAD modelleme aracı olan Onshape kullandım. Beş parça halinde gelir: kafa, üst şapka, sol ve sağ kanatlar ve ön tüy aksanı.


STL dosyaları Hackster'daki yazımımdan alınabilir. Kendi 3D yazıcınız yoksa, 3D Hub veya Shapeways gibi bir hizmeti de kullanabilirsiniz.
Dizaynı değiştirmek ister misiniz? Lütfen yap! Ana hususlar şunlardır:
- “Beyin” elektroniği kafanın içine sığmalıdır (kablolar uzun, fakat servo levhanın altına inecek kadar uzun değil).
- Piezo buzzer ve kamera modüllerini - özellikle kamera - kolayca yerleştirebildiğinizden emin olun. Modelleri yeniden boyutlandırırsanız, bazı ekstra düzenlemelere ihtiyaç duyarlar.
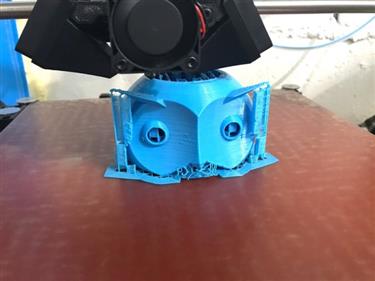
Baykuş kafam basıldığında biraz komik çıktı çünkü gaga iyi desteklenmedi.
 |
 |
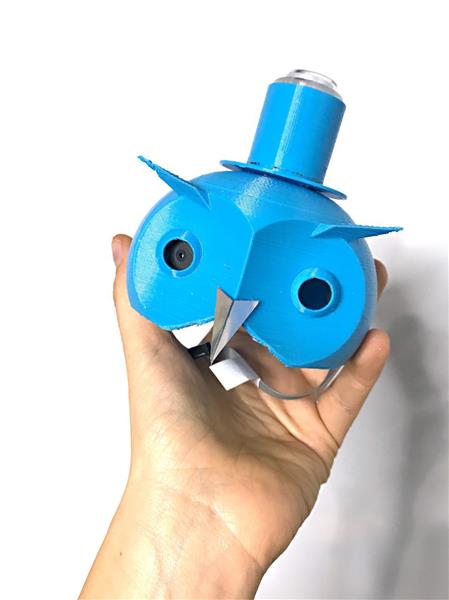
Bu yüzden ona parlak bir sibernetik gaga vermek için eski bir CD kullandım. Harika görünüyor! Bunu yapmak için, CD'yi bir kaba koyun ve kaynar suda saklayın. 5 dakika bekletin, ve bir miktar delamine olduğunu fark edeceksiniz - iki katman birbirinden ayrılmaya başladı, bir tarafta parlak bellek folyosuyla. Yolun geri kalan kısmını ayırın ve tercih ettiğiniz gaga şeklini oluşturmak için makasla ayırın; İki simetrik parçalar halinde yaptım.
Sonra yüzüne sıcak yapıştırın. Çıplak plastik tarafı dışarı bakacak şekilde yerleştirin. Bu şaşırtıcı derecede dayanıklıdır, ancak CD'yi tamir için elinizde bulundurun.
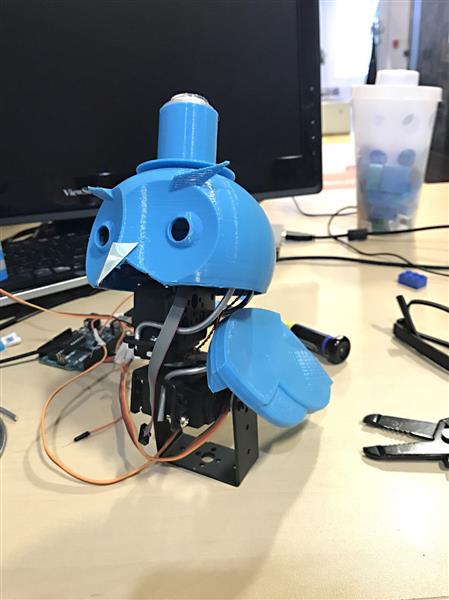
ROBOT MONTAJI
Tüm robotu bir araya getirmeye hazır olduğunuzda, 3D baskılı kafanızı ve şapkalarınızı alın. Düğmeyi üst şapkaya takın, kabloları delikten geçirin ve sıcak tutkal ile yerine yapıştırın. Sonra, başlığı kafanın üstüne yapıştırın.
Kamera bir gözün içine bakar ve piezo diğerinden zıplar; Tutkalın gizlenmesi için onları sıcak yapıştırdım. Oldukça sağlam bir şekilde tutturulmuşlardır (tutkal hakkında hevesli olmaya eğilimliyim). Durum LED'i sadece aşağıya sarkıyor; Sanırım bu şekilde havalı görünüyor ve henüz hiçbir şeye yakalanmadı, ancak sizinkileri yerinde tutmak isteyebilirsiniz. Armatür telini alın - bu, genellikle sanat mağazalarında bulunabilecek heykelleri desteklemek için kullanılan sağlam bir teldir. Başı destekleyecek birkaç döngüsünü bağlamak için üst servo yuvasında iyi bir nokta bulun. Bunu yaptıktan sonra, kabloyu ısıyla daraltmak için kaydırın, böylece elektronik parçalar kısa devre yapmaz.

Daha sonra, servo bağlantılarınız metalden yapılmışsa, bunları Pi'den yalıtmak için üstüne bir miktar elektrik bandı koyun. Daha sonra üzerine çift taraflı bir köpük bant parçası koyun ve Pi'yi bunun üzerine yerleştirin. Bu oldukça sağlam bir şekilde yerinde tutacaktır. Başlığı elektroniklerin üstüne yerleştirin.
Şimdi, kanatları bağlamak için iki adet armatür kablosu kullanın. Alttaki servo yuvasındaki bir delikten bir ucu geçirin, kanadı üzerine geçirin ve daha sonra kabloyu servo yuvasındaki başka bir delikten geçirin.
 |
 |
Tel kalınlığı, kanat halkalarıyla uyumlu olmalı ve oldukça sağlam olmalıdır; Sadece çok fazla tork uygulamayın ve gelecek aylarca iyi çalışmalılar. Kanatlara çarpmadığından, hasar ve mutsuz servolara neden olmak için robotun kafasını çevirin. Arduino taslağındaki uçları da kontrol et. Şimdi son 3D baskılı parça için: Tüy pufunu alt servoun önüne gevşek bir şekilde takın. Bir papyonun içine bağlanmış ince bir tel örgü kullandım.

Kafayı tel halkalarına sabitlemek isteyebilirsiniz, çünkü etrafta gezinebilir ... ama bu aynı zamanda beyni meraklı arkadaşlara göstermeyi zorlaştırır.
OMUZ MONTAJ
Son olarak, robotunuzu giyilebilirlik için kullanmanın zamanı geldi! Yaklaşık 6 fit uzunluğunda bir armatür telini (veya biraz daha) alın. Bir ucu servo yuvasının etrafına ve etrafına sarın, böylece servoyu sabit olarak destekleyin. Gelecekte, özel bir 3D yazdırılabilir omuz montajını modellemeyi planlıyorum çünkü tel gevşeyip etrafta dolanabiliyor, ancak şimdilik şimdilik yapacak ve daha hafif servo / desteklere sahip bir robot daha iyi şansa sahip olabilir. Armatür telinin kalanını ikiye katlayın. Bu, bisiklet iç borusunun geldiği yer: Valf ile parçayı kesin ve uzun, içi boş bir tüpünüz var. (Biraz toz çıkabilir.) Kolunuzun etrafından dolacak bir döngü oluşturun ve alt servo yuvasına sabitleyin. Ardından, iki kat telinizi tüpten geçirin. Tüm yol boyunca gitmemeli. İç borunun üst ucunu ayırın ve robotunuzun tabanına bağlayın.

Şimdi bir kablo demeti oluşturmak için göğsünüzün etrafındaki boruyu çaprazlayın. Omuz döngüsünü sarmak için yumuşak bir bandana kullandım ve servo dağı, onları yastır ve kemeri çok daha rahat hale getirir. Arduino ve kablosunun etrafından, gerilmeye karşı da destekledim - 3D baskılı bir muhafaza da eklemeyi planlıyorum, ama yine de eşarp düğümünün içine geri asılacak.
OWL SİSTEMLERİ
Robotun giymeye hazır. Kolunuzun etrafındaki halka ile omzunuza yerleştirin, ardından teli ve boruyu gövdenin etrafına sarın, böylece sağlam bir şekilde desteklenir. Sarımları tutun ve lastiğin ucunu, kablolarınızla karışmayacak şekilde tutun. İyi eğlenceler!
14.11.2018
Adanada Robotik Kodlama Eğitimi Veren YerlerGeleceğin mühendislerini yetiştiriyoruz. Adana robotik kodlama atölyesi olarak bu eğitimlerde katılımcıların Robotik dünyası ile tanışmalarını, her yaş grubuna uygun...DEVAMI Adana Robotik ve Kodlama Eğitmenlik EğitimiAdana Robotik ve Kodlama Eğitmenlik Eğitimi
Adana Maker Eğitmen Eğitimi Sertifika Programı Ekim 2021 ayında ÇUBİTED ve MAG-NET WEB işbirliği ile yapılacak...DEVAMI
Adana Robotik ve Kodlama Eğitmenlik EğitimiAdana Robotik ve Kodlama Eğitmenlik Eğitimi
Adana Maker Eğitmen Eğitimi Sertifika Programı Ekim 2021 ayında ÇUBİTED ve MAG-NET WEB işbirliği ile yapılacak...DEVAMI
